



مفهومی که اغلب مردم از ماشینهای خودران در ذهن دارند وسیله نقلیهای است که در عمل بدون نیاز به عامل انسانی قادر است هدایت یک ماشین را بر عهده بگیرد. در حالی که تولیدکنندگان خودرو به سختی در حال رقابت با یکدیگر هستند و هر یک در نظر دارند بیشترین سهم از بازار را از آن خود کنند، اما در مقابل هر یک از این خودروسازان در زمینه فناوری ماشینهای خودران با چالشهای تقریبا یکسانی روبرو هستند. چالشهایی که به چند مورد از آنها در این مقاله اشارهای خواهیم داشت.

سطوح مختلف ماشینهای خودران
سطح صفر
همانگونه که ممکن است حدس زده باشید رانندگی کامل ماشین در اختیار راننده قرار دارد. در نتیجه راننده باید همه کارهایی همچون هدایت ماشین، ترمز گرفتن و واکنش نشان دادن به علائم رانندگی و ترافیک را عهدهدار شود.
سطح یک
به معنای آن است که یک یا چند سامانه کمکی همچون سرعت (کروز کنترل تطبیقی) و فرمان (دستیار بین خطوط) در شرایطی خاصی از سوی ماشین و بدون دخالت راننده هدایت وسیله نقلیه را بر عهده میگیرند، اما این سامانهها به یکدیگر متصل نبوده و در نتیجه ماشین در آن واحد قادر نیست کنترل دو سامانه را عهدهدار شود.
سطح دو
ماشین خودرانی را در اختیار دارید که به شکل هوشمندانهای از سامانهها استفاده میکند. در سطح دو ماشین در شرایط خاصی فرمان، شتاب و ترمز را کنترل میکند. در این سطح سه سامانه کنترلکننده ترمز/ شتاب و فرمان با یکدیگر در ارتباط هستند. اما فراموش نکنید در این سطح بازهم راننده مسئولیت تغییر لاین (خط) و پاسخگویی به علایم رانندگی را عهدهدار است.
سطح سه
شما با ماشین خودران شرطی روبرو هستید. در این سطح زمانی که شرایط ایدهآل باشد، ماشین میتواند بر روند رانندگی کنترل بیشتری داشته باشد و همچنین محیط پیرامون خود را زیر نظر بگیرد. در شرایطی که سامانه فاقد توانایی در کنترل امور باشد آنگاه به راننده اجازه میدهد هدایت ماشین را عهدهدار شود.
سطح چهار
شما با ماشین خودران سطح بالا سروکار دارید. در این سطح ماشین بدون آنکه در انتظار بنشیند تا دستور را از راننده دریافت کرده یا نیاز داشته باشد تا راننده بر کارهای سامانه نظارت داشته باشد ماشین را هدایت میکند. اما فراموش نکنید که در این سطح باید نقشه خیابانها (جادهها) و ناحیه جغرافیایی برای ماشین تعریف شده است.
سطح پنج
شما با یک ماشنی خودران کامل سروکار دارید. ماشینی که بدون دخالت یا نظارت راننده قادر است در هر جادهای به تردد بپردازد. در این سطح راننده در نقش یک کمککننده ظاهر میشود و مسیری که در نظر دارد به آن برود را در اختیار ماشین قرار میدهد. تسلا و گوگل در حال کار روی ماشینهایی هستند که در این سطح تردد کند. ایلان ماسک گفته است که میتواند تا دو سال دیگر چنین ماشینهایی را روانه بازار کند.
چالشهای قانونی
در حال حاضر در کشورهایی همچون ایالات متحده ماشینهای خودران تا سطح 3 در شهرهای مختلف این کشور به جزء نیویورک قادر به تردد هستند. قانون خاصی در نیویورک وجود دارد که اعلام میداد حداقل یک دست راننده همواره باید روی فرمان ماشین قرار داشته باشد، این حرف به معنای آن است که سامانههای رانندگی پیشرفته در مقطع فعلی و حتا آینده که مجهز به کنترل کروز و حفظ لاین شوند بازهم قادر نخواهند بود در نیویورک بهطور کامل به کار گرفته شوند. در مقابل ایالتی همچون نودا به تولیدکنندگان اجازه داده است تا خودرانهای سطح 5 را در این ایالت آزمایش کنند.
سردرگمی حالت

مهندسان آئودی در گذر از کنترل انسانی به کنترل کامپیوتری از اصطلاح سردرگمی حالت (mode confusion) استفاده کردهاند. مطالعات نشان میدهد زمانی که یک انسان بهطور کامل از وضعیت رانندگی خارج شود، در شرایط اضطراری حداقل به ده ثانیه زمان نیاز دارد تا بتواند بهطور کامل کنترل اوضاع را به دست گیرد. برای ماشینهای خودرانی که از سوی کامپیوتر هدایت میشوند این زمان زیادی است که کنترل دومرتبه در اختیار عامل انسانی قرار گیرد. اکثر ماشینهای خودران امروزی قادر نیستند در مدت زمان ده ثانیه کنترل را در اختیار عامل انسانی قرار دهند. بر همین اساس آئودی پیشبینی کرده است که در آینده مرزبندیهای مشخصی در ارتباط با سامانههای هدایتکننده به وجود خواهد آمد تا کامپیوترها به درستی بدانند کنترل چه بخشهایی باید در آن واحد در اختیار انسانها قرار گیرد.
نقشهبرداری بیش از حد دقیق
فناوری موقعیتیابی و مکانیابی دقیق یکی دیگر از مولفههای ضروری است که ماشینهای خودران مستقل به آن نیاز دارند. ما درباره یک موقعیتیابی چند سانتیمتری صحبت نمیکنیم، ما در مورد فاصلهای 10 یا 20 سانتیمتری صحبت میکنیم که خودران به درستی بداند فاصله ایمن با ماشینهایی که در کنار یا روبروی آن قرار دارند چقدر است، فاصله آن با خط عابرپیاده باید چقدر باشد و با نگاه کردن به خطوطی که در کف خیابانها و جاده کشیده شده است چه عکسالعملی را باید از خود نشان دهد. این یکی از مهمترین موضوعاتی است که ایمنی این وسایل نقلیه را افزایش میدهد. در مواجه شدن با چنین علائمی ماشین میداند که حداقل ده ثانیه زودتر از وارد شدن به چنین شرایطی باید راننده را مطلع کند. در دسامبر سال گذشته میلادی، سه شرکت آئودی، AG، بیامو و Daimler با همکاری نوکیا فرآیند نقشهبرداری دیجیتالی را با هدف دستیابی به دقیقترین جزییات آغاز کردند. فراموش نکنید که در این راه باید بستری باز برای نقشهبرداری به وجود آید. به عبارت دقیقتر اگر یک استاندارد مشخص که همه خودروسازان بر مبنای آن حرکت کنند ایجاد شود بدون شک شتاب بیشتری به این روند خواهد بخشید.

ارتباطات مبتنی بر کلاود
ممکن است شما هم به این نکته واقف شده باشید که یک وسیله نقلیه در هر بار مراجعه به یک زیرساخت باز برای دریافت اطلاعات دقیق نقشهبرداری به حجم کم یا زیادی از اطلاعات نیاز دارد. در اغلب موارد ماشین به حجم بسیار بالایی از دادهها نیازمند است. مهندسان آئودی میگویند که میزان دادههایی که این وسایل نقلیه به آن نیاز دارند تقریبا فراتر از حد تصور است. بهطور مثال Q7 آئودی به منظور انجام تحلیلهای دقیق به دادههای بلادرنگ بسیار زیادی نیاز دارد. اطلاعاتی که باید آنها را دریافت کرده و ارسال کند. در نتیجه در مقطع فعلی تنها راهحل کاربردی روی آوردن به ارتباطات مبتنی بر کلاود است که بتواند این اطلاعات را ضبط، ذخیره و مدیریت کند. این اطلاعات وارد و خارج شونده به رشد صنعت ماشینهای خودران کمک فراوانی میکند.

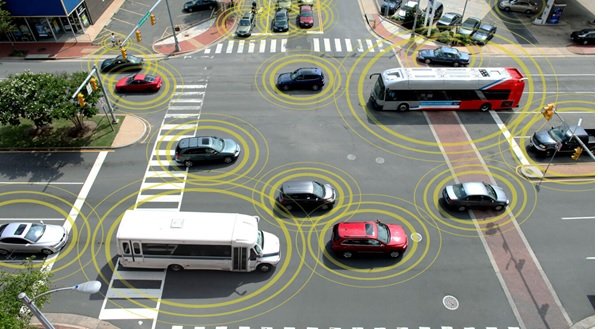
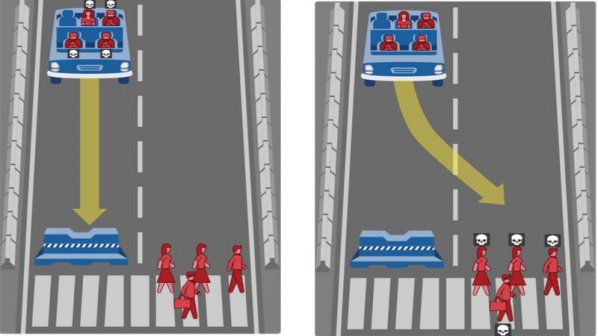
وضعیتهای چالشی
تقاطعات پرازدحام، تقاطعاتی که فاقد چراغ راهنمایی هستند، تقاطعاتی که فاقد علائم ترافیکی هستند یا مناطقی که انسانها و ماشینها در نزدیکی یکدیگر قرار دارند از چالشهای اصلی ماشینهای خودران پیشرفته است. انسانها در مواجه شدن با چنین حالتهایی میدانند که بر مبنای یک ارتباط غیر کلامی باید چه عکسالعملی را نشان دهند. همچنین در جادههایی که علائم نامعلوم بوده یا وجود ندارند در اغلب موارد میدانند چه عکسالملی را باید از خود نشان دهند. در نتیجه یک ماشین خودران باید یاد بگیرد که اصطلاحات و حرکات انسانی چه معنا و مفهومی دارند. تصادفی که چندی پیش ماشین خودران گوگل با یک اتوبوس داشت، نشان داد که این موقعیتها چقدر چالشبرانگیز هستند.

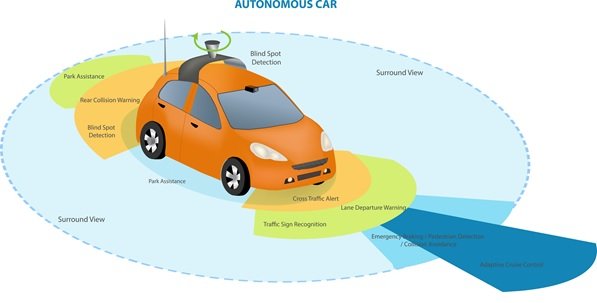
افزوده شدن تعداد حسگرها
اگر نقشهبرداری دقیقی انجام شود و ارتباطات مبتنی بر ابر نیز به شکل دقیقی برقرار شوند و اگر خودرها یاد بگیرند که چگونه رفتارهای انسانها را تحلیل کنند، هنوز هم مسائلی وجود دارد که باعث میشود آنها با مشکل روبرو شوند. حسگرها در مواجه شدن با یک لایه از یخ و برف به سرعت کارایی خود را از دست میدهند و ناکارآمد میشوند. استفاده از حسگرهای چندگانه میتواند راهحل خوبی برای افزایش ایمنی باشد. آئودی میگوید: «واحدهای گرمایشی میتوانند تا حد زیادی این مشکل را حل کنند. مولفههایی که از مدتها قبل در کنار دوربینها و حسگرها قرار گرفتهاند. این حسگرها زمانی که احساس کنند سطح عملکرد کاهش پیدا کرده این موضوع را به راننده اطلاع میدهند، اگر حسگرها موفق نشوند هشدار لازم را به راننده بدهند، واحدهای دیگری وجود خواهند داشت که به بتوانند به شکل موقت ماشین را هدایت کنند.»
امنیت سایبری
در مقطع فعلی ما با تعداد کمی از ماشینهای متصل سروبرو هستیم، در نتیجه مبحث هک این وسایل هنوز جدی نشده است. اما آونگ ساعت به سرعت در حال حرکت است و اتومبیلهای بیشتر و بیشتری در حال اتصال به اینترنت هستند. ماشینهایی که به هاتاسپاتهای وایفای متصل میشوند. نظرسنجی انجام شده از سوی Kelley Blue Book نشان میدهد که هرچند مردم در خصوص هک شدن خودروهای خود نگران هستند، اما این چالشی است که در چند سال آینده به شکل جدی با آن روبرو خواهیم شد. این نظرسنجی نشان میدهد که اگر ماشین خودران مردم از طریق گوشی هوشمند یا یک برنامه موبایلی هک شود بازهم مردم خودروسازان را مقصر اصلی خواهند دانست. مهندسان آئودی معتقد هستند که برای اجتناب از به وجود آمدن شرایط غیر قابل کنترل در آینده باید سطح امنیت این ماشینها در تعامل با شرکتهای فعال در زمینه امنیت بالا رود. به ویژه آنکه هوش مصنوعی در این زمینه میتواند نقش کلیدی داشته باشد.
ماهنامه شبکه را از کجا تهیه کنیم؟
ماهنامه شبکه را میتوانید از کتابخانههای عمومی سراسر کشور و نیز از دکههای روزنامهفروشی تهیه نمائید.
ثبت اشتراک نسخه کاغذی ماهنامه شبکه
ثبت اشتراک نسخه آنلاین
کتاب الکترونیک +Network راهنمای شبکهها
- برای دانلود تنها کتاب کامل ترجمه فارسی +Network اینجا کلیک کنید.
کتاب الکترونیک دوره مقدماتی آموزش پایتون
- اگر قصد یادگیری برنامهنویسی را دارید ولی هیچ پیشزمینهای ندارید اینجا کلیک کنید.





















نظر شما چیست؟