



انسانها، و بلکه ديگر جانداران نيز، هنگام تعامل با يکديگر رفتارهای ظريفی از خود بروز میدهند که بهرغم ظرافتشان حاوی نشانههای مهمی است و به تعاملشان جهت میدهد. از آن جمله، چگونگی و جهت نگاه انسانها هنگام گفتوگو با يکديگر است که میتواند به فهم و تداوم گفتوگو کمک کند يا حتی بهآن پايان دهد. در عصر جديد اين شماره که عمدتاً براساس مقاله آنجليکا ليم از نويسندگان اسپکتروم تنظيم شدهاست، همين موضوع را در ارتباط با تعامل روباتها و انسانها از نظر خواهيم گذراند.
آنجليکا ليم مقالهاش را چنين آغاز میکند: «همين چندسال پيش با يکی از نسخههای پيشين روبات «ريم» (REEM) روبهرو شدم. ريم بلندتر و پهنتر از من بود، و هرجا که میرفتم چشم های درشت و مشکیاش را به دنبال من میگرداند. هنگامیکه جابهجا میشدم، با نگاه خيرهاش مرا دنبال میکرد. او با چنان دقتی نگاهش را روی من قفل میکرد که گویی با ليزر درون روحم را نشانه رفتهاند. اينک هشت سال است که روی روباتها کار میکنم. ريم مسلماً طراحی چشمنوازی داشت. اما يک چيز درباره رفتار او ناراحتم میکرد، و پژوهشگران اينک دريافتهاند که آن نکته آزاردهنده چه چیزی بود.»
شون آندريست، از دانشگاه ويسکانسين مديسون، میگويد که لازم است روباتها گاهی نگاهشان را از ما برگردانند. تماس نگاه (eye contact) در تعامل اجتماعی انسانها با یکدیگر نقش مهمی دارد (و از اينرو است که ما میخواهيم همان را در روباتها نيز پياده کنيم)،اما در اين ميان نکته ظریفی وجود دارد و آن، تعداد دفعههایی است که ما انسانها هنگام گفتوگو به چشم يکديگر نگاه میکنيم. بهگفته آندريست، انسانها در تمام مدت گفتوگو به هم خيره نمیشوند. ما زمانی که شنوندهايم، تقريباً در70 درصد اين مدت، به چشمهای گوينده مینگريم. اما وقتی گويندهايم، تنها در 40 درصد از مدتی که مشغول صحبت هستيم، مستقيم به چشم شنونده نگاه میکنيم. آندريست در بخشی از سخنان خود در کنفرانس ACM/IEEE Human-Robot Interaction Conferenceافزوده بود، دانش روانشناسی درباره اينکه چرا ما هنگام گفتوگو گاهی نگاهمان را به اطراف معطوف میکنيم سه علت را ارائه می دهد.
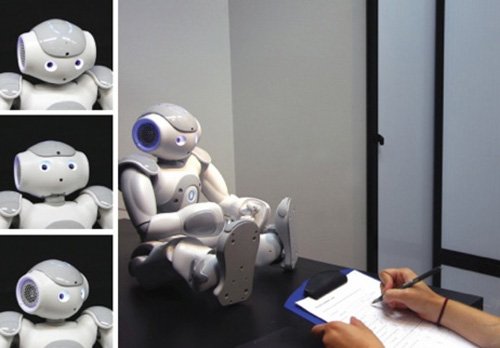
شکل1. بررسی چگونگی و جهت نگاه روی روبات NAO (عکس از: spectrum.ieee.org).
نخست اينکه، ما جای ديگری را نگاه میکنيم تا نشان دهيم در حال فکرکردن هستیم، در اين مواقع چشمهایمان معمولاً بالا را نگاه میکند. دوم، انسانها با اينکار سطح فضای دوستانه را کنترل میکنند. آنها به اطراف نگاه میکنند تا از معناهای تلويحی منفی (negative connotation) که ممکن است در صورت زل زدن به شخص برداشت شود، پيشگيری کنند. و سرانجام اينکه انسانها بخشی از فرآيند گفتوگو را با نگاههایشان مديريت میکنند تا نشان دهند نوبت چه کسی است که حرف بزند. هر نگاه میتواند دربردارنده نشانهای باشد که هم گوينده و هم شنونده، بیهيچ توضيحی معنای آن را درمیيابند. برای مثال، وقتی گوينده برای چند لحظه از حرف زدن بازمیايستد، در حالي که هنوزصحبتش تمام نشده است و قصد دارد آن را ادامه دهد، چشمش را بهسوی ديگری میگرداند و با اينکار نوبت خود را نگاه میدارد. به بيان ديگر، او میخواهد نشان دهد که صبحتش هنوز پايان نیافته است و تنها دارد نفسی تازه میکند. اما اگر همينکار را پيش از آغاز سخنانش انجام دهد، میتواند بهاين معنی باشد که میخواهد سؤالی بپرسد.
آندريست برای مطالعه دقيق اين رفتارها، آمار تغيير جهت نگاه بين انسانهایی را که دوبهدو گفتوگو میکردند، بررسی کرد:
در شکل 2، دادههای ترکيبی حاصل از چند آزمايش تعاملی نشان داده شده است: هر دايره نشان میدهد که جهت نگاه انسان هنگام گفتوگو چه معنایی میتواند داشته باشد. برای مثال، دايره آبیرنگ با عنوان «شناخت» در بالای سر نشان میدهد که در 39.3 درصد مواقع، وقتی که نگاه شخص به بالا متمايل میشود، به دلیل فکر کردن است. آندريست، با بهکارگيری اين آمار برای يک روبات NAO، برنامهای نوشت تا روبات بتواند با درنظر گرفتن همين الگوها، نگاهش را حرکت دهد.1 روبات NAO برای ردگيری چهره انسانهایی که با آنها حرف میزد از دستگاه حرکتسنج کينکت مايکروسافت بهره میبرد و میتوانست جهت نگاه خود را با همان ميزان احتمالی تغيير دهد که ممکن است از انسانها سر بزند.

شکل2: جهت نگاه میتواند دربردارنده نشانههای گوناگونی باشد (عکس از spectrum.ieee.org).
او همچنين با استفاده از حرکتهای خفيف سر به چپ و راست، به تداوم فضای دوستانه کمک میکرد. آندريست از يک فيلتر کالمن Kalman Filter استفاده کرد تا اين حرکتهای بیهدف (تصادفی) سر را با تغيير جهت نگاه در هم بياميزد و نگاه نرم و طبيعیتری ايجاد کند. همچنين اين روبات، نوبت خود را هنگام گفتوگو بهتر نگاه میداشت و برای اينکار بين جملههاي خود وقفههای خيلی کوتاهی ايجاد میکرد.
نتايج کار او نشان داد که وقتی NAO بهجای زل زدن به مخاطب، نگاه خود را در جهتهای گوناگون حرکت میدهد، کاربران او را آگاهتر، انديشمندتر و نوآورتر میبینند. اما اگر يک روبات نگاه خود را زيادی به اينسو و آنسو بچرخاند، به چه معنا است؟ اين همان وقتناشناسی در عوض کردن جهت نگاه است که آزمایش شد.
نتيجه آنکه، اگر جهت نگاه خیلی زياد يا به طور نابهجا تغيير کند میتواند نماينده حسهایی همچون شرمساری يا تنفر باشد. پس خودداری کامل از نگاه کردن به مخاطب شيوه درستی نبود. يکی از يافتههای شگفتآور آندريست و همکارانش زمانی آشکار شد که آنها شمار واژههای کاربران را در پاسخ به پرسش خصوصی NAO، بررسی کردند. شگفتی اين يافته از آنرو بود که نتيجهای خلاف موارد بالا را نشان میداد: کاربران در برابر روباتی که چشمهايش را در جهتهای مختلف حرکت میدهد، چندان راحت نيستند و بههمين علت در پاسخ به پرسش شخصی او واژههای بيشتری را بهکار میبرند. آندريست در توضيح چرایی اين موضوع میگويد، شايد علت آن نه حرکت چشمهای NAO، بلکه اساس چهره او باشد که چندان صميمانه نيست. چهره و نگاه NAO نسبتاً سرد وماشينی است.

اين پژوهشگران همچنين نگاه چهار کاراکتر مجازی (آواتار) را هماهنگ با آزمايشهایشان تنظيم کرده و تعامل 24 شرکتکننده با اين کاراکترها را در يکی از سه حالت زير بررسی کردند:
- وقتشناسی در تغيير دادن جهت نگاه،
- وقتناشناسی در تغيير دادن جهت نگاه،
- نگاه خيره 2.
در اين آزمايش، پس از آنکه اشخاص از آواتار سؤال میپرسيدند و از او پاسخی دریافت نمی کردند، اگر آواتار در زمانی مناسب نگاه خود را از آنها برمیگرفت و بهجای ديگری چشم میدوخت، بهاو زمان بيشتری میدادند تا پاسخ دهد.
در واقع هنگامیکه آواتار چنين رفتار انسانگونهای از خود نشان میداد، افراد شرکتکننده در آزمايش، مکث او در پاسخ دادن به پرسشهایشان را ناشی از ناکارآمدی سيستم نمیدانستند، بلکه ناشی از اين میدانستند که آواتار در حال فکر کردن به پاسخی است که می خواهد ارائه دهد. بهنظر میرسد در سالهای دور که روباتيک و هوش مصنوعی هنوز در آغاز راه بودند دانشمندان بيشتر بر گسترش توانمندیهای اساسی روباتها تمرکز داشتند. اما اينک که برخی از آن اهداف نخستين برآورده شدهاست، پيادهسازی رفتارهای ظريف انسانی در روباتها نيز موردتوجه قرار گرفتهاست؛ رفتارهایی که میتوانند تعامل اين آدموارهها را با انسانها بهطرز چشمگيری بهبود دهند.
پانويس:
1- کدهای شون آندريست برای پروژه نگاهگردانی NAO را میتوان، بهصورت رايگان، از این آدرس دريافت کرد.
2- فيلتر کالمن، بهطور خلاصه، الگوريتمی است که اندازهگيریهای صورتگرفته در گذر زمان، از جمله نويزها و ديگر عوامل تصادفی و نادقيق، را درنظر میگيرد تا برآورد دقيقتری ارائه دهد.
* نتيجه پژوهشهای گروهی شون آندريست، شيانگ ژی تان،مايکل گليچر، و بيلگ موتلو از دپارتمان علوم کامپيوتر دانشگاه ويسکانسين-مديسون در 4 مارس 2014 در کنفرانس Human Robot Interaction ارائه شد.
* تصوير ابتدای مقاله برگرفته از وبسايت دانشگاه Aalto، فنلاند.
منابع:
-مقاله What robot behavior makes people feel uncomfortable،نويسنده:Angelic Lim، آوريل 2014، سايت spectrum.ieee.org.
- مقاله This robot’s been programmed to look you in the eye at just the right times، نويسنده: Jason Dorrier، می 2014، سايت singularityhub.com.
ماهنامه شبکه را از کجا تهیه کنیم؟
ماهنامه شبکه را میتوانید از کتابخانههای عمومی سراسر کشور و نیز از دکههای روزنامهفروشی تهیه نمائید.
ثبت اشتراک نسخه کاغذی ماهنامه شبکه
ثبت اشتراک نسخه آنلاین
کتاب الکترونیک +Network راهنمای شبکهها
- برای دانلود تنها کتاب کامل ترجمه فارسی +Network اینجا کلیک کنید.
کتاب الکترونیک دوره مقدماتی آموزش پایتون
- اگر قصد یادگیری برنامهنویسی را دارید ولی هیچ پیشزمینهای ندارید اینجا کلیک کنید.





















نظر شما چیست؟